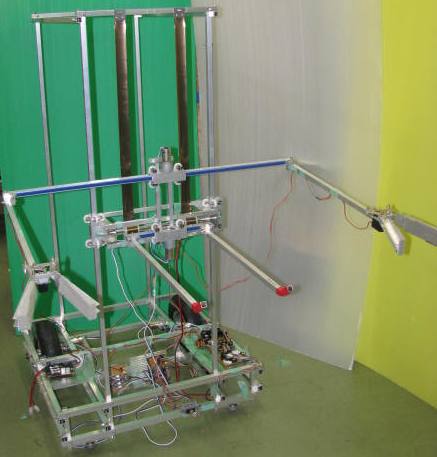
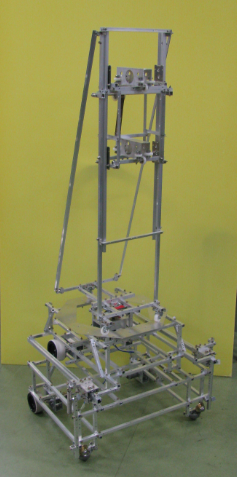
NHK2012
NHK大学ロボコン2012に出場した機体です。資料があまりなかったため、開発初期の写真です。
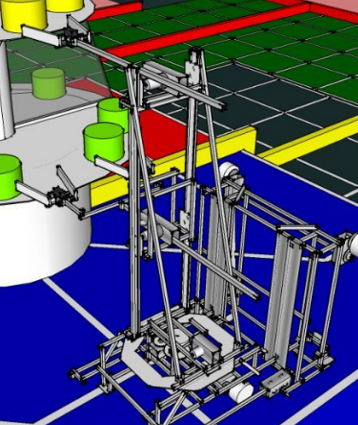
NHK2012 手動ロボット
かご・コレクターロボットを持ち上げる機構
フォークリフトの要領で「かご」やコレクターロボットを持ち上げる。
手動ロボットのフォーク部分を左右に動くように製作している。
これによって、コレクターロボットが取りやすく、取った後も正確な位置に保持することができる。
安全
安全のため操縦者の足元には、モータ駆動系回路に供給する部分の電源を遮断するスイッチを取り付けてある。
このため、操縦者の足がそのスイッチから離れるとロボットは自動的に停止する。
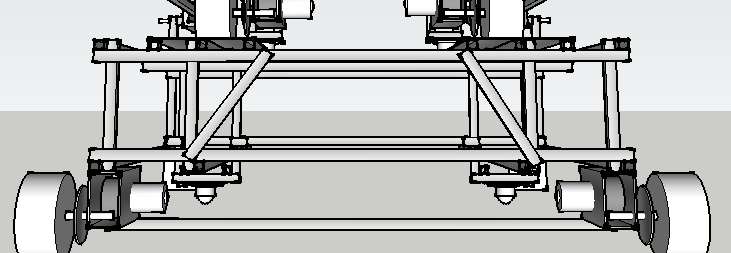
頑丈な足回り
人間の体重に耐えることのできる、大きく頑丈なタイヤを取り付けてある。回路の面でも素子を丈夫なものにしてあるため、人が乗って動いても耐えることができる。

トークン回収アーム
サーボモーターを用いることで軽量なアームを実現することが出来た。これによってアームの関節を増設することができ、上下左右自由自在に「トークン」を狙うことができる。

NHK2012 自動ロボット

コレクターロボットの搭載部分
かごアームの幅にコレクターロボットがちょうど収まるようになっている。また、かごアームでコレクターロボットを保持することによって安定して走行することができる。さらに、鉤爪型ストッパーでコレクターロボットを固定することによって、坂でもずれることなく運ぶことができる。
かごの感知
スタート時に「かご」の有無を操作者が判断し、走行パターンを変えることができる。また、スタートさせた後で相手が先に「かご」を取ったとしても、測距センサを用いることで事前に感知し、すぐにもう一方の「かご」を取りに行くことができる。
かごアーム
かごアームは平行リンクを用いることで、「かご」を持ち上げると共にロボットの中心に引き寄せることができる。これによって重心バランスが安定するので、精度よい走行ができる。
NHK2012 コレクターロボット
手動ロボット・自動ロボットとの連携
下図のような穴が作られている。この穴の形状によりロボットを持ち上げた際、正確に同じ位置で保持される為、赤外線通信を確実に行うことができる。加えて、軽量化を行うことで手動ロボット、自動ロボットにかかる負荷の軽減を図る。
階段を登る機構
ロボットには図のように上下にタイヤを取り付ける。「ローディングエリア2」では下のタイヤ、「アイランド」では上のタイヤを使用する。下のタイヤは上のタイヤが前進する力によって自動的に「アイランド」の上に引き上げられるようになっている。タイヤを切り替える際に階段に当たることで、位置のずれの補正も行う。
饅頭を回収する機構
「饅頭」の回収はサーボモーターを使用したアームを製作する。アームは前後伸縮、左右への旋回ができ、測距センサを用いることで微調整を可能とする。
さらに、伸縮・旋回を行うことで「饅頭」確保後にタイヤを使用せずに、「饅頭」を「かご」まで運ぶことができる。